Product Advantages
Innovative Design and Modular Integration
Engineered with a compact φ44 × 40.6 mm footprint and lightweight 14 g construction, this mosaic-G5 GNSS module offers versatile mechanical integration into small and medium UAVs. The inclusion of an 8-pin GH1.25 mm connector ensures straightforward electrical connection and system compatibility. Dual base/rover modes facilitate flexible deployment scenarios, while the low-voltage operation (3.0–5.5 V) supports power-efficient system design. The multi constellation GNSS module architecture enhances antenna diversity and spatial signal acquisition, optimizing satellite visibility and positioning reliability across various global regions and operational environments.
Optimized Performance and User-Centric Features
With centimeter-level RTK positioning accuracy and rapid update frequencies, this industrial RTK navigation module delivers real-time performance crucial for precise flight control and autonomous mission execution. The module’s support for multiple GNSS protocols and fast baud rates reduces integration complexity and allows easy pairing with existing navigation systems. Low-noise RF design enhances reliability, minimizing positioning errors caused by signal interference or multipath effects. This translates to smoother UAV operation, reduced pilot intervention, and consistent mission success, making it a valuable component for developers and operators seeking dependable high-precision navigation technology.
丨 Product Introduction Our company's AK737, a GNSS receiver made of mosaic-G5 chip module, has excellent performance and can simultaneously receive signals from multiple satellite systems such as GPS, Beidou, GLONASS, etc., achieving centimeter level or even higher precision positioning. It has advanced algorithms built-in, which can effectively deal with complex environmental interference, high data update rate, and can output accurate position and speed information in real time.
characteristic:
Multi system compatibility: supports global satellite systems such as Beidou and GPS, and achieves high-precision joint positioning.
Centimeter level accuracy: RTK technology achieves horizontal accuracy of 0.6cm+0.5ppm, vertical accuracy of 1cm+1ppm, and speed measurement of 3cm/s.
20Hz high update rate: fast response to dynamic scenes, strong real-time performance.
Dual mode flexible configuration: can be set as a base station or a mobile station.
Wide compatibility: compatible with flight control systems such as Pixhawk and APM, easy to integrate.
Low noise design: Industrial grade RF circuit to improve signal reception quality.
丨 Specification parameters
|
Picture
Parameter
|

|
|
|
|
|
Product name
|
AK712
|
AK712RM
|
AK717
|
AK973T
|
|
Chip
|
UBX-F9P
|
UBX-F9P
|
UBX ZED-F9P
|
UM960
|
|
Operating Frequency
|
BDS: B1 B2
GPS: L1 L2
GLONASS: L1 L2
GALILEO:E1E2
QZSS: L1 L2
SBAS:
WASS,EGNOS,MSAS
|
BDS: B1 B2
GPS: L1 L2
GLONASS: L1 L2
GALILEO: E1 E2
QZSS: L1 L2
SBAS:
WASS,EGNOS,MSAS
|
GPS: L1, L2;
BDS: B1I, B2I;
GLONASS: L1, L2;
Galileo: E1, E5b;
QZSS :L1 L2
SBAS:
WASS, EGNOS, MSAS
|
BDS: B1I、B2I、B3I、B1C、B2a
GPS: L1C/A、L2P(W)、L2C、L5
GLONASS: L1C/A、L2C/A
Galileo: E1、E5b、E5a
QZSS: L1、L2、L5
|
|
Receiving channel
|
184
|
184
|
184
|
1408
|
|
Cold start
|
26s
|
26s
|
26s
|
< 30 s
|
|
Hot start
|
2s
|
2s
|
2s
|
/
|
|
Re capture
|
2s
|
2s
|
2s
|
/
|
|
Initialization Time
|
<5s (typical value)
|
<5s (typical value)
|
<5s (typical value)
|
<5s (typical value)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning:1.5m CEP
|
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.8cm+ 1.5 ppm
|
|
Speed accuracy
|
<0.05m/s
|
<0.05m/s
|
<0.05m/s
|
0.0 3m/s
|
|
Time accuracy
|
30ns
|
30ns
|
30ns
|
20ns
|
|
Convergence time
|
≤10s
|
≤10s
|
≤10s
|
/
|
|
Baud rate
|
38400bps(Default)
|
38400bps(Default)
|
38400bps(Default)
|
115200bps(Default)
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183,RTCM 3.3,UBX
|
NMEA0183,RTCM 3.3,UBX
|
NMEA0183,RTCM 3.3,UBX
|
NMEA 0183, Unicore*
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.3/3.2/3.1/3.0
|
RTCM 3.x
|
RTCM 3.x
|
|
Update frequency
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3.3-5.5V DC
|
5V DC
|
|
Power consumption
|
<180mW @3.3V
|
<180mW @3.3V
|
<180mW @3.3V
|
800mW
|
|
Size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
Weight
|
21g
|
21g |
21g |
21g |
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 6pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-35℃+80℃
|
-35℃+80℃
|
-35℃+80℃
|
-35℃+80℃
|
|
Storage temperature
|
-40℃-+85℃
|
-40℃-+85℃
|
-40℃-+85℃
|
-40℃-+85℃
|
|
Compass
|
|
Built in with electronic compass RM3100
|
Built in with electronic compass ist8310
|
Built in with electronic compass ist8310
|
|
Picture
Parameter
|

|
|
|
|
|
Product name
|
AK713
|
AK713T
|
AK713RM
|
AK713CAN
|
|
chip
|
UM980
|
UM980
|
UM980
|
UM980
|
|
Operating Frequency
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
|
Receiving channel
|
1408
|
1408
|
1408
|
1408
|
|
Cold start
|
<10s
|
<10s
|
<10s
|
<10s
|
|
Initialization time
|
<5s (Typical value)
|
<5s(Typical value)
|
<5s(Typical value)
|
<5s(Typical value)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
|
Speed accuracy
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
|
Time accuracy
|
10ns
|
10ns
|
10ns
|
10ns
|
|
Baud rate
|
115200bps(Default)
|
115200bps(Default)
|
115200bps(Default)
|
1Mbps
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
DroneCAN/UAVCAN
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.3 / 3.2 / 3.1 / 3.0 (RTCM data input only supported via UART2)
|
|
Update frequency
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3V-5.5V DC
|
5V DC
|
|
Power consumption
|
800mW
|
800mW
|
800mW
|
800mW
|
|
Size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
Weight
|
21g |
21g |
21g |
21g |
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-35℃-80℃
|
-35℃-80℃
|
-35℃-80℃
|
-35℃-80℃
|
|
Storage temperature
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
|
Compass
|
/
|
Built in electronic compass IST8310
|
Built in electronic compass RM3100
|
Built in electronic compass RM3100
|
|
Picture
Parameter
|
|
|
|
|
|
Product model
|
AK714
|
AK714T
|
AK724
|
AK734
|
|
chip
|
Beiyun M20
|
Beiyun M20
|
Beiyun M21
|
Beiyun M22
|
|
Operating Frequency
|
BDS:B1l、 B2l、B3l、B1C、B2a、B2b
GPS:L1 C/A、L1C、L2、L5
GLO:G1、G2
GAL:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS)
NavlC:L5
SBAS*:L1 C/A
|
BDS:B1l、 B2l、B3l、B1C、B2a、B2b
GPS:L1 C/A、L1C、L2、L5
GLO:G1、G2
GAL:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS)
NavlC:L5
SBAS*:L1 C/A
|
BDS-2: B1I/B2I/B3I
BDS-3:B1C*/B2a/B2b(PPP)*/B3I
GPS: L1 C/A/L1C*/L2/L5
GLONASS: G1/G2
Galileo: E1/E5a/E5b/E6(HAS)*
QZSS: L1C/A/L1C/L2/L5、L6(CLAS)*
NavIC: L5
SBAS*:L1C/A
|
BDS-2: B1I/B2I/B3I
BDS-3:B1C*/B2a/B2b(PPP)*/B3I
GPS: L1 C/A/L1C*/L2/L5
GLONASS: G1/G2
Galileo: E1/E5a/E5b/E6(HAS)*
QZSS: L1C/A/L1C/L2/L5、L6(CLAS)*
NavIC: L5
SBAS*:L1C/A
|
|
Receiving channel
|
1507
|
1507
|
1507
|
1507
|
|
cold start
|
≤30s
|
≤30s
|
30s
|
30s
|
|
hot start
|
≤5s
|
≤5s
|
5s
|
5s
|
|
Re capture
|
≤1s
|
≤1s
|
≤1s
|
≤1s
|
|
Horizontal Accuracy
|
Normal positioning: 1.5mCEP
|
Normal positioning: 1.5mCEP
|
Single point: 1.5m
|
Single point: 1.5m
|
|
RTK positioning: 0.01m+1ppmCEP
|
RTK positioning: 0.01m+1ppmCEP
|
RTK:0.01m + 1ppm
|
RTK:0.01m + 1ppm
|
|
speed accuracy
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
|
Second pulse accuracy
|
≤20ns
|
≤20ns
|
≤ 20 ns
|
≤ 20 ns
|
|
Inertial Navigation Type
|
/
|
/
|
Single inertial navigation system
|
Dual inertial navigation system
|
|
gyroscope
(Range)
|
/
|
/
|
±300°/s
|
±300°/s
|
|
gyroscope
(Zero bias instability)
|
/
|
/
|
5°/h
|
5°/h
|
|
gyroscope
(Scale error)
|
/
|
/
|
4‰
|
4‰
|
|
accelerometer
(Range)
|
/
|
/
|
± 16g
|
± 16g
|
|
accelerometer
(Zero bias instability)
|
/
|
/
|
50μg
|
50μg
|
|
accelerometer
(Scale error)
|
/
|
/
|
2‰
|
2‰
|
|
accelerometer
(System functional safety)
|
/
|
/
|
ASIL B
|
ASIL B
|
|
Baud rate
|
115200bps (default)
|
115200bps (default)
|
115200bps (default)
|
115200bps (default)
|
|
output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA,RTCM3.3, BYNAV
|
NMEA,RTCM3.3, BYNAV
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
|
Data update frequency
|
Default 1Hz (0.25Hz-10Hz)
|
Default 1Hz (0.25Hz-10Hz)
|
Default 1Hz (0.25Hz-10Hz)
|
Default 1Hz (0.25Hz-10Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
working voltage
|
3V~5.5V DC
|
3V~5.5V DC
|
3V~5.5V DC
|
3V~5.5V DC
|
|
power consumption
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
|
size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
weight
|
21g |
21g |
21g |
21g |
|
interface
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
operation temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
storage temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
compass
|
/
|
Built in electronic compass IST8310
|
/
|
/
|
|
picture
parameter
|
|
|
|
|
model
|
AK723T
|
AK723RM
|
AK737
|
|
chip
|
UM981
|
UM981
|
Septentrio_mosaic-G5
|
|
Operating Frequency
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
NavIC L5
SBAS L1C/A
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
NavIC L5
SBAS L1C/A
|
GPS: L1C/A, L1C, L2C,L2PY, L5
GLONASS: L1C/A, L2CA, L2P, L3 CDMA
BDS: B1I, B1C, B2a, B2I,B2b, B3I
Galileo: E1, E5a, E5b, E6
QZSS: L1C/A, L1C/B, L2C, L5,L6
|
|
working channel
|
1408
|
1408
|
789 channels (synchronized tracking across all constellations)
|
|
cold start
|
26s
|
26s
|
<35s
|
|
hot start
|
2s
|
2s
|
<10s
|
|
Re capture
|
2s
|
2s
|
<1s
|
|
Inertial navigation accuracy
|
<5% x driving distance (no GNSS signal)
|
<5% x driving distance (no GNSS signal)
|
/
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.2m CEP
|
|
RTK positioning: 0.08m+1 ppm CEP
|
RTK positioning: 0.08m+1 ppm CEP
|
RTK positioning: 0.06m+0.5 ppm CEP
|
|
GNSS attitude accuracy
|
/
|
/
|
When the antenna spacing is 1 meter: heading accuracy is 0.15 °, roll/pitch accuracy is 0.25 °
When the antenna spacing is 5 meters: heading accuracy is 0.03 °, roll/pitch accuracy is 0.05 °
|
|
speed accuracy
|
0.05m/s
|
0.05m/s
|
0.03m/s
|
|
time accuracy
|
30ns
|
30ns
|
PPS resolution: 1.4ns
|
|
Baud rate
|
115200bps (default)
|
115200bps (default)
|
115200bps (default)
|
|
output interface
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183、Unicore
|
NMEA0183、Unicore
|
NMEA 0183, v2.3, v3.03, V4.0
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
|
Data update rate
|
Default 1Hz (0.25Hz-50Hz)
|
Default 1Hz (0.25Hz-50Hz)
|
Default 1Hz (1Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
|
working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3V-5.5V DC
|
|
power consumption
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
|
size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
weight
|
21g |
21g |
21g |
|
interface
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
operation temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
storage temperature
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
|
compass
|
Built in electronic compass IST8310
|
Built in electronic compass RM3100
|
Built in electronic compass IST8310
|
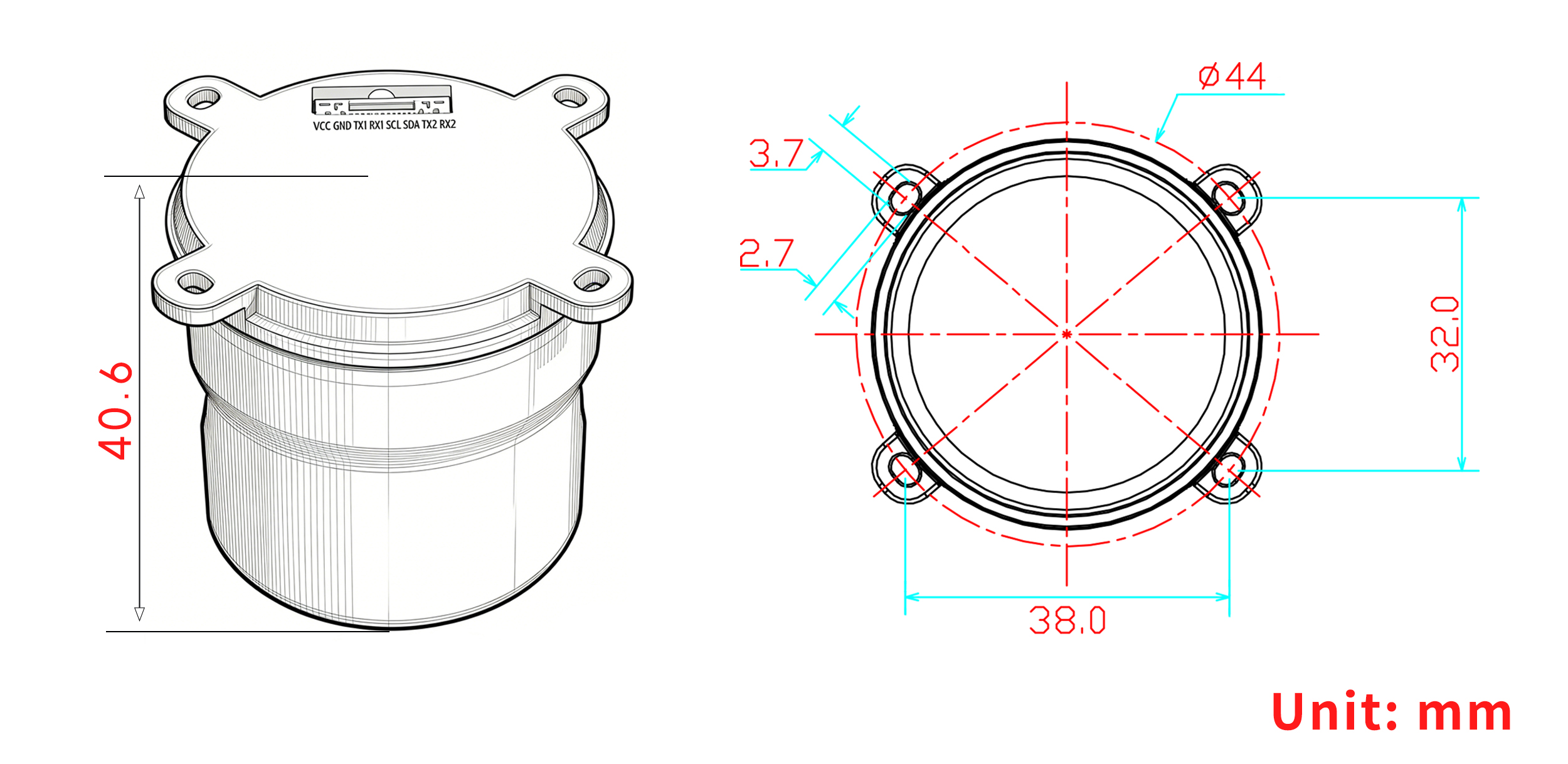
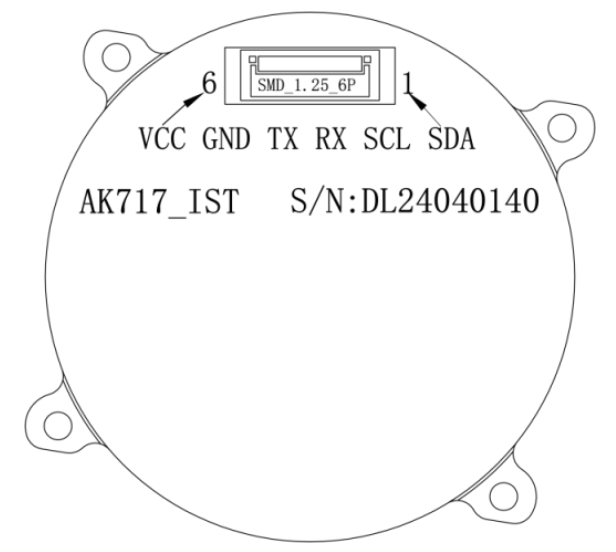
Table 1: Definition of 6PIN pins
|
NO.
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power supply input, +3.3V to +5V
|
|
2
|
GND
|
Module ground, this is the negative end of the power supply or the common ground point, used to complete the power circuit.
|
|
3
|
TX
|
Transmit - This pin is used in serial communication to send data to another device.
|
|
4
|
RX
|
Receive - This pin is used in serial communication to receive data from another device.
|
|
5
|
SCL
|
Serial Clock - In the I²C communication protocol, this is the clock signal line used to synchronize data transmission.
|
|
6
|
SDA
|
Serial Data - In the I²C communication protocol, this is the line used for data transmission.
|
|
Note: Typically, VCC and GND are used for power supply, TX and RX are used for serial communication, while SCL and SDA are used for I²C communication. These interfaces allow the receiver to exchange power supply and data with external devices.
|
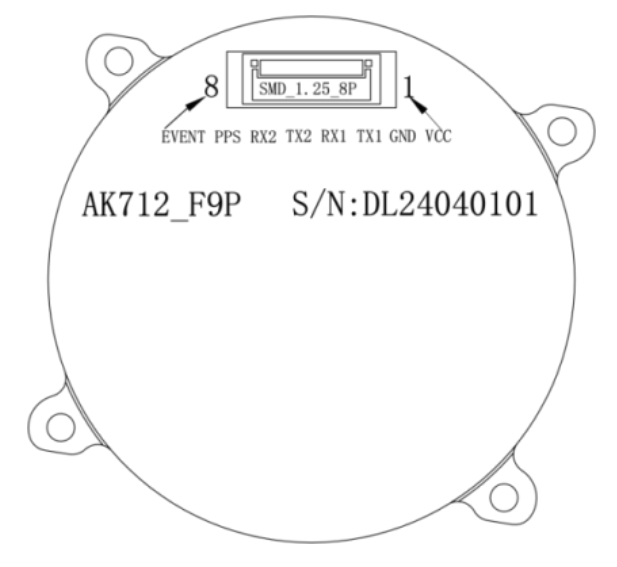
Table 2: Definition of 8PIN pins
|
No.
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power input, +3.3V to 5V
|
|
2
|
GND
|
Module ground
|
|
3
|
TX1
|
UART1 output, 3.3V TTL
|
|
4
|
RX1
|
UART1 input, 3.3V TTL
|
|
5
|
TX2
|
UART2 output, 3.3V TTL
|
|
6
|
RX2
|
UART2 input, 3.3V TTL
|
|
7
|
PPS
|
Pulse Per Second output for time synchronization
|
|
8
|
EVENT
|
Module external terminal output (default off)
|
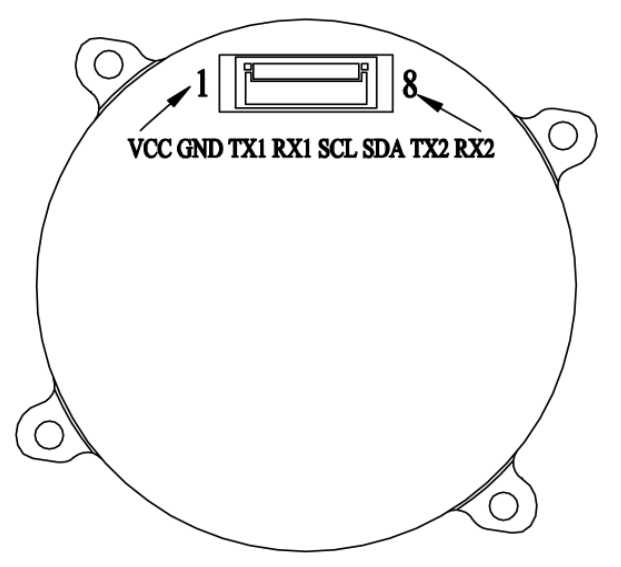
Table 3: Definition of 8PIN pins
|
Serial Number
|
Pin Definition
|
describe
|
|
1
|
VCC
|
Main power input+ 3.3V~5V
|
|
2
|
GND
|
Module grounding
|
|
3
|
TX1
|
Serial port 1 sends data, 3.3VTTL
|
|
4
|
RX1
|
Serial port 1 receives data, 3.3VTTL
|
|
5
|
SCL
|
I ² C serial clock(IST8310/RM3100)
|
|
6
|
SDA
|
I ² C serial data(IST8310/RM3100)
|
|
7
|
TX2
|
Serial port 2 sends data, 3.3VTTL
|
|
8
|
RX2
|
Serial port 2 receives data, 3.3VTTL
|
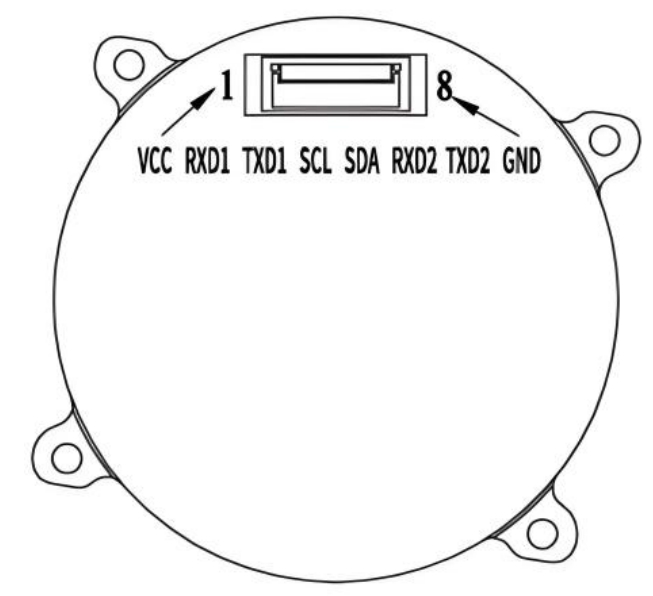
Table4: PIN Function
|
Pin Number
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power input,+ 5V
|
|
2
|
RXD1
|
Receive data port 1, 3.3VTTL
|
|
3
|
TXD1
|
Send data port 1, 3.3VTTL
|
|
4
|
SCL
|
I ² C Serial Clock (IST8310)
|
|
5
|
SDA
|
I ² C Serial Data (IST8310)
|
|
6
|
RXD2
|
Receive data port 2, 3.3VTTL
|
|
7
|
TXD2
|
Send data port 2, 3.3VTTL
|
|
8
|
GND
|
Grounding
|

Use Scenarios
Application in UAV Autopilot Systems
In unmanned aerial vehicle operations, integrating this multi band GNSS receiver module into autopilot systems enables centimeter-level accuracy necessary for autonomous flight control. Operating within challenging outdoor environments, the module maintains stable satellite tracking across multiple constellations, ensuring uninterrupted RTK corrections for precise positioning. This capability supports complex mission profiles such as terrain-following, precise waypoint navigation, and automated data capturing. The compatibility with TTL serial interfaces and standard RTK protocols simplifies integration with flight controllers, allowing system architects to deploy reliable navigation hardware that enhances flight safety and operational efficiency.
Role in Precision Surveying and Geospatial Data Collection
For geospatial professionals requiring high-accuracy measurements, the mosaic-G5 GNSS module acts as a critical positioning tool in surveying and mapping workflows. Its multi constellation GNSS module technology ensures strong signal reception in environments with partial obstructions, such as urban or forested areas. Acting as either a rover receiver or base station, the module supports RTK networks delivering real-time centimeter-level location data. This precision facilitates accurate mapping, reduces post-processing time, and improves data reliability for infrastructure planning, agricultural monitoring, and environmental analysis. Integration with standard communication protocols streamlines the module’s inclusion into survey instruments and data logging systems, supporting efficient field operations.
FAQ
What types of applications is the Septentrio Mosaic G5-P3H module suitable for?
Our multi-band GNSS receiver module is designed for various uses, including UAV autopilot integration, precision mapping, and real-time navigation in challenging environments. It delivers centimeter-level accuracy to support autonomous operations and survey-grade data collection.
Can I customize the Mosaic G5-P3H module for specific projects or OEM needs?
Yes, we offer flexible OEM/ODM customization services for the industrial RTK navigation module. Our team works closely with clients to tailor firmware, interfaces, and hardware options, ensuring the module fits seamlessly in your unique system design.
How do I integrate the Mosaic G5-P3H with common UAV flight controllers?
The module supports standard output protocols such as NMEA, RTCM, and UBX with TTL interfaces, allowing easy integration with popular flight controllers. We provide technical consulting and firmware support to help you achieve precise and reliable positioning integration.
What measures do you take to ensure product quality and reliability?
We follow strict quality control, including SMT assembly, functional testing, and final inspection. Certified to ISO9001:2015 and compliant with CE and RoHS standards, our production ensures each multi-constellation GNSS module meets industry-grade performance and durability.









































