丨 Product IntroductionProduct Introduction:
AK993 RTK board, based on the UM980 chip, delivers centimeter-level high-precision positioning, stable performance in complex environments, and enhanced protection with its professional housing. It is widely suitable for surveying, smart agriculture, autonomous driving, and engineering, offering a reliable and accurate positioning solution. Features:
1. High-precision positioning: RTK mode delivers ~8mm horizontal accuracy & 15mm vertical accuracy, meeting high-precision requirements
2. Full-system full-frequency tracking: Supports full-band tracking of BDS/GPS/GLONASS/Galileo, enabling reliable positioning in complex scenarios
3. Strong anti-interference: 60dB narrowband anti-interference tech ensures stable positioning in complex environments
4. Fast & efficient: Instant RTK initialization + backup battery "hot start" drastically reduces initial positioning time
5. Flexible & versatile: Mobile/base station dual-mode operation; generates RTCM 3.x calibration data, suitable for multiple work scenarios
丨 Product Structure
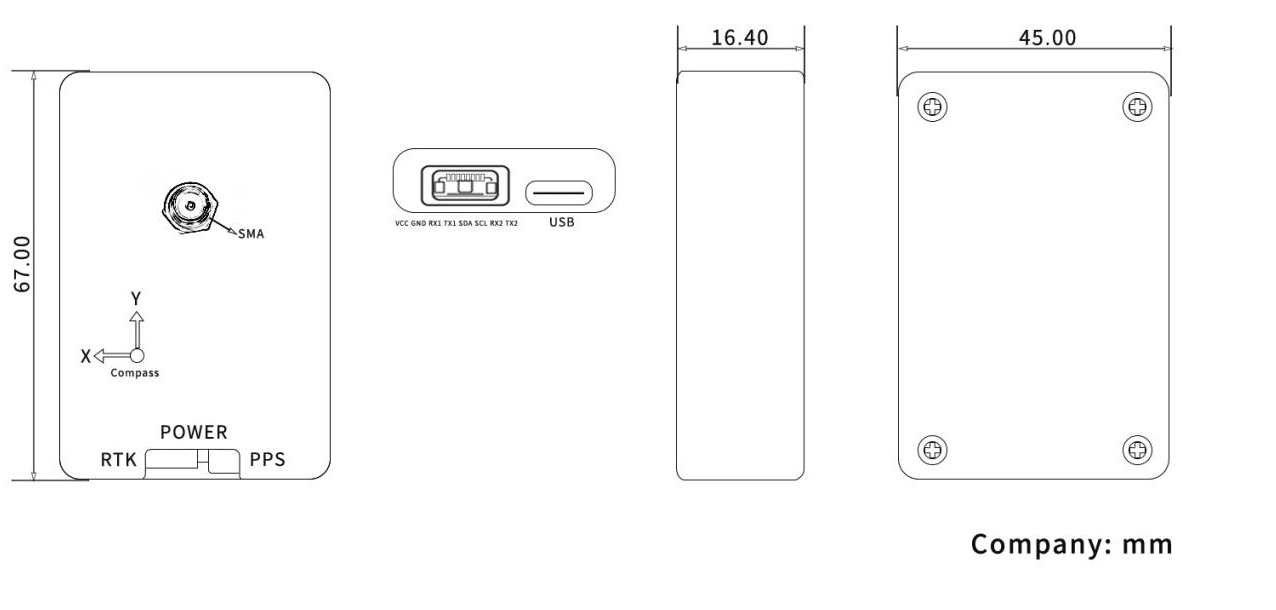
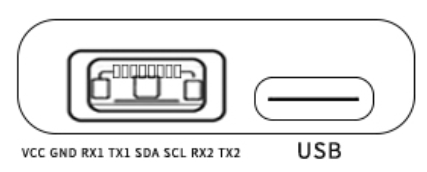
PIN Foot Function
|
NO.
|
Pin Name
|
Describe
|
|
1
|
VCC
|
The power input pin provides the necessary voltage for the device to operate
|
|
2
|
GND
|
Ground pin
|
|
3
|
RX1
|
The receiving end of serial interface 1 is used to receive data sent by external devices through serial port 1.
|
|
4
|
TX1
|
The transmitting end of serial interface 1 is used to send data to external devices through serial port 1.
|
|
5
|
SDA
|
The data pin of the I ² C bus is responsible for data transmission in I ² C communication.
|
|
6
|
SCL
|
The clock pin of the I ² C bus provides a clock signal for synchronous data transmission in I ² C communication.
|
|
7
|
RX2
|
The receiving end of serial interface 2 is used to receive data sent by external devices through serial port 2.
|
|
8
|
TX2
|
The transmitting end of serial interface 2 is used to send data to external devices through serial port 2.
|
|
Chip
characteristics
|
Chip
|
UM980
|
|
Operating Frequency
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
|
Receiving channel
|
1408 channel
|
|
Accuracy
|
Single point positioning (RMS)
|
Plane: 1.5m
|
|
Elevation: 2.5m
|
|
DGPS(RMS)
|
Plane: 0.4m
|
|
Elevation: 0.8m
|
|
RTK(RMS)
|
Flat: 0.8cm+1ppm
|
|
Elevation: 1.5cm+1ppm
|
|
Observation accuracy(RMS)
|
BDS
|
GPS
|
GLONASS
|
Galileo
|
|
B1I/B1C/L1C/L1 C/A/E1/G1 pseudorange
|
10cm
|
10cm
|
10cm
|
10cm
|
|
B1I/B1C/L1C/L1 C/A/E1/G1 Carrier Phase
|
1mm
|
1mm
|
1mm
|
1mm
|
|
B3I/L2P(Y)/L2C/G2 pseudorange
|
10cm
|
10cm
|
10cm
|
10cm
|
|
B3I/L2P(Y)/L2C/G2
Carrier Phase
|
1mm
|
1mm
|
1mm
|
1mm
|
|
B2I/B2a/ B2b/L5/E5a/E5b pseudorange
|
10cm
|
10cm
|
10cm
|
10cm
|
|
B2I/B2a/ B2b/L5/E5a/E5b Carrier Phase
|
1mm
|
1mm
|
1mm
|
1mm
|
|
time accuracy (RMS)
|
10ns
|
|
Speed accuracy (RMS)
|
0.03m/s
|
|
Start Time
|
cold start
|
<10s
|
|
initialization time
|
<5s(Typical value)
|
|
Initialize reliability
|
>99.9%
|
|
Output data
|
Baud rate
|
115200bps (default) [Optional: 4800-921600]
|
|
output interface
|
TTL/USB
|
|
Output Protocol
|
NMEA0183、RTCM 3.3
|
|
update frequency
|
1Hz-20Hz(default 1Hz)
|
|
Differential
data
|
Differential data
|
RTCM 3.3/3.2/3.1/3.0
|
|
Carrier phase output
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
|
Electrical
specifications
|
working voltage
|
3~5.5V DC
|
|
power consumption
|
<800mW
|
|
Physical
parameters
|
size
|
67*45*16.4mm
|
|
weight
|
31g
|
|
Housing material
|
aluminium
|
|
connector
|
TYPE-C/SH1.00mm 6pin
|
|
Connector
|
SMA straight head
|
|
Environment
|
operation temperature
|
-35℃-80℃
|
|
storage temperature
|
-40℃-95℃
|
|
Compass
|
compass
|
IST8310
|
Packaging and Delivery:






























