
GPS Modules for Precision Flight Control
A practical look at module selection for demanding flight-control conditions, including update behavior, signal reliability, and integration planning.
Read articleGNSS Module Sourcing
The AK967 is a compact positioning board for procurement teams sourcing a dependable UBX-M9140 GNSS module for UAV flight control, robot navigation, vehicle tracking, agricultural machinery, handheld devices, and embedded IoT terminals.
For buyers comparing the ubx-m9140-kb supply path, the visible product data highlights multi-constellation reception, 0.25Hz to 25Hz update support, low power operation, and connector choices that can be matched to internal or external antenna layouts.

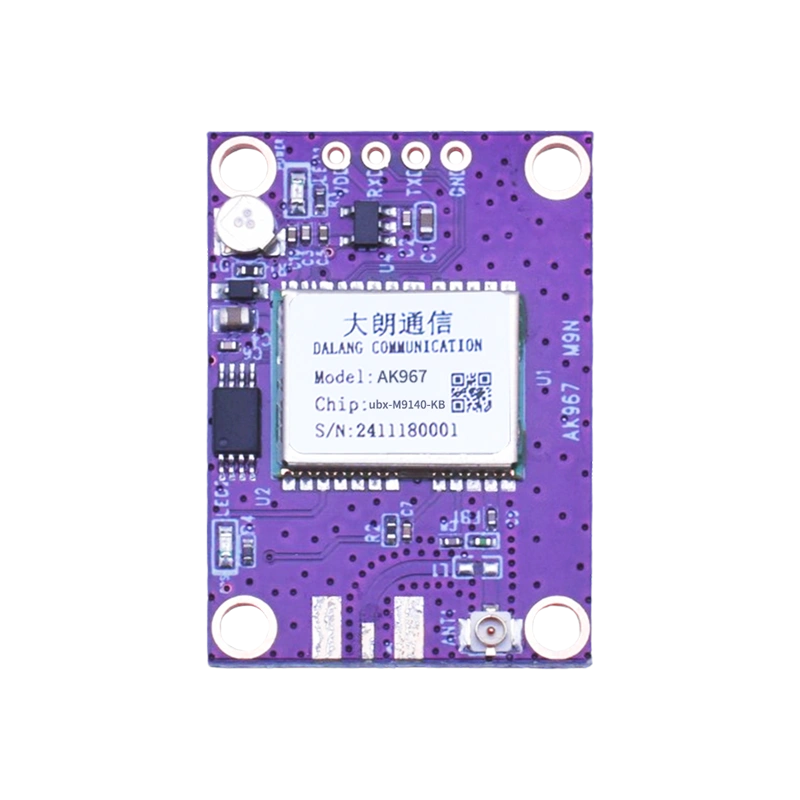
This procurement page focuses on the AK967 module configuration using the UBX-M9140 positioning chip. The module is positioned for buyers who need a small GNSS board with multi-system reception, selectable antenna connector formats, and stable repeatability for embedded navigation products. Engineering teams should validate firmware settings, antenna pairing, host interface parameters, and enclosure conditions during sample testing.
| Product Model | AK967 |
|---|---|
| Chip | UBX-M9140 |
| Supported Systems | GPS, BeiDou, GLONASS, Galileo, QZSS, SBAS |
| Channels | 92 channels |
| Positioning Accuracy | 1.5 m CEP with SBAS, based on listed product data |
| Update Rate | 0.25Hz to 25Hz |
| Protocol Output | NMEA0183, RAWX; confirm project firmware requirements |
| Interface | UART, PPS timing signal listed on product data |
| Input Voltage | 3.3 V to 5 V DC |
| Power Consumption | Less than 100 mW |
| Antenna Connector | IPEX, SMA, MCX, MMCX options |
| Dimensions | 35 x 25 x 4 mm |
| Weight | 3.8 g |
| Operating Temperature | -40 C to 85 C |
Connector, output-rate, and host-interface details can be reviewed against project drawings before sample approval.
Procurement teams can document firmware, antenna, and packing requirements to support consistent repeat orders.
The module format fits engineering evaluation for UAV, robot, tracking, and IoT positioning products.
These technical articles support product evaluation for flight-control, robot movement, and multi-constellation GNSS selection.
A practical look at module selection for demanding flight-control conditions, including update behavior, signal reliability, and integration planning.
Read articleThis article reviews how stronger GNSS module choices can support robot movement control, outdoor positioning, and repeatable navigation development.
Read articleA buyer-friendly overview of how multi-constellation modules use several satellite systems to improve positioning availability in everyday hardware.
Read articleSample comments reflect common evaluation priorities from buyers comparing compact GNSS modules for embedded positioning projects.
Five-star rating
The module size and 25Hz option made it suitable for our flight-control sample board review. We focused on antenna connector choice, UART settings, and repeatable labeling for our pilot run.
Five-star rating
For outdoor robot testing, we needed a compact GNSS module with clear protocol details. The AK967 gave our team a straightforward starting point for host-controller evaluation.
Five-star rating
Our purchasing team compared connector options and operating temperature requirements before sample approval. The specification format helped us align the module with several tracker designs.
Key questions for engineering and purchasing teams before sample testing or batch evaluation.
The AK967 UBX-M9140 module is used for embedded positioning in UAV flight-control systems, robot movement platforms, vehicle trackers, portable navigation devices, agricultural equipment, and other hardware that needs compact GNSS reception with configurable output rates.
The product information lists support for GPS, BeiDou, GLONASS, Galileo, QZSS, and SBAS signal use. For procurement, buyers should confirm the required constellation mix, firmware configuration, and regional test conditions before mass integration.
A 25Hz update rate can provide more frequent position output than low-rate modules, which helps flight-control, robotics, and dynamic vehicle systems reduce navigation lag when the host controller and firmware are configured to use that data rate.
Engineers should confirm UART voltage level, baud-rate settings, NMEA0183 or RAWX output needs, PPS timing requirements, pin assignment, antenna connector selection, backup power expectations, and mechanical clearance around the 35 x 25 x 4 mm board.
Connector choice should match the antenna cable, enclosure layout, vibration environment, and service-access plan. IPEX is common for compact internal layouts, while SMA, MCX, or MMCX may be preferred where stronger external antenna connection is needed.
Before batch purchasing, confirm firmware version, target constellation settings, sample test results, update-rate configuration, antenna pairing, connector orientation, label requirements, export packing, and whether the same settings can be repeated across production lots.

















