丨 Product IntroductionGNSS high-precision receiver:It can achieve centimeter level positioning and is suitable for unmanned aerial vehicles, automobiles, and measurement fields. Using carrier phase difference technology, supporting base station and mobile station modes as well as RTCM standards.
Performance: Static accuracy<1 centimeter, dynamic accuracy<2 centimeters, output rate 1-10/20Hz.
characteristic:Multi system support: Beidou, GPS, GALILEO, GLONASS joint computing.
Antenna advantage: Built in four arm spiral antenna ensures high precision.
Flexible configuration: can be used as a base station or mobile station.
Good compatibility: Compatible with flight systems such as Pixhawk and APM.
Low noise anti-interference: Industrial grade low-noise RF circuit with strong multipath resistance.
High precision mode: supports differential positioning and vector measurement.
丨 Specification parameters
|
Picture
Parameter
|

|

|
|
|
|
Product name
|
AK712
|
AK712RM
|
AK717
|
AK973T
|
|
Chip
|
UBX-F9P
|
UBX-F9P
|
UBX ZED-F9P
|
UM960
|
|
Operating Frequency
|
BDS: B1 B2
GPS: L1 L2
GLONASS: L1 L2
GALILEO:E1E2
QZSS: L1 L2
SBAS:
WASS,EGNOS,MSAS
|
BDS: B1 B2
GPS: L1 L2
GLONASS: L1 L2
GALILEO: E1 E2
QZSS: L1 L2
SBAS:
WASS,EGNOS,MSAS
|
GPS: L1, L2;
BDS: B1I, B2I;
GLONASS: L1, L2;
Galileo: E1, E5b;
QZSS :L1 L2
SBAS:
WASS, EGNOS, MSAS
|
BDS: B1I、B2I、B3I、B1C、B2a
GPS: L1C/A、L2P(W)、L2C、L5
GLONASS: L1C/A、L2C/A
Galileo: E1、E5b、E5a
QZSS: L1、L2、L5
|
|
Receiving channel
|
184
|
184
|
184
|
1408
|
|
Cold start
|
26s
|
26s
|
26s
|
< 30 s
|
|
Hot start
|
2s
|
2s
|
2s
|
/
|
|
Re capture
|
2s
|
2s
|
2s
|
/
|
|
Initialization Time
|
<5s (typical value)
|
<5s (typical value)
|
<5s (typical value)
|
<5s (typical value)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning:1.5m CEP
|
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.8cm+ 1.5 ppm
|
|
Speed accuracy
|
<0.05m/s
|
<0.05m/s
|
<0.05m/s
|
0.0 3m/s
|
|
Time accuracy
|
30ns
|
30ns
|
30ns
|
20ns
|
|
Convergence time
|
≤10s
|
≤10s
|
≤10s
|
/
|
|
Baud rate
|
38400bps(Default)
|
38400bps(Default)
|
38400bps(Default)
|
115200bps(Default)
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183,RTCM 3.3,UBX
|
NMEA0183,RTCM 3.3,UBX
|
NMEA0183,RTCM 3.3,UBX
|
NMEA 0183, Unicore*
|
|
Update frequency
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3.3-5.5V DC
|
5V DC
|
|
Power consumption
|
<180mW @3.3V
|
<180mW @3.3V
|
<180mW @3.3V
|
800mW
|
|
Size
|
Φ42*31.2mm
|
Φ42*31.2mm
|
Φ42*31.2mm
|
Φ42*31.2mm
|
|
Weight
|
13.2g
|
13.2g
|
13.2g
|
13.2g
|
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 6pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-35℃+80℃
|
-35℃+80℃
|
-35℃+80℃
|
-35℃+80℃
|
|
Storage temperature
|
-40℃-+85℃
|
-40℃-+85℃
|
-40℃-+85℃
|
-40℃-+85℃
|
|
Compass
|
|
Built in with electronic compass RM3100
|
Built in with electronic compass ist8310
|
Built in with electronic compass ist8310
|
|
Picture
Parameter
|
|
|
|
|
Product name
|
AK713
|
AK713T
|
AK713RM
|
|
chip
|
UM980
|
UM980
|
UM980
|
|
Operating Frequency
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
|
Receiving channel
|
1408
|
1408
|
1408
|
|
Cold start
|
<10s
|
<10s
|
<10s
|
|
Initialization time
|
<5s (Typical value)
|
<5s(Typical value)
|
<5s(Typical value)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
|
Speed accuracy
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
|
Time accuracy
|
10ns
|
10ns
|
10ns
|
|
Baud rate
|
115200bps(Default)
|
115200bps(Default)
|
115200bps(Default)
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
|
Update frequency
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3V-5.5V DC
|
|
Power consumption
|
800mW
|
800mW
|
800mW
|
|
Size
|
Φ42*31.2mm
|
Φ42*31.2mm
|
Φ42*31.2mm
|
|
Weight
|
13.2g
|
13.2g
|
13.2g
|
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-35℃-80℃
|
-35℃-80℃
|
-35℃-80℃
|
|
Storage temperature
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
|
Compass
|
/
|
Built in electronic compass IST8310
|
Built in electronic compass RM3100
|
|
picture
parameter
|
|
|
|
|
|
Product name
|
AK714
|
AK714T
|
AK723T
|
AK723RM
|
|
Chip
|
Beiyun M20
|
Beiyun M20
|
UM981
|
UM981
|
|
Operating Frequency
|
BDS:B1l、 B2l、B3l、B1C、B2a、B2b
GPS:L1 C/A、L1C、L2、L5
GLO:G1、G2
GAL:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS)
NavlC:L5
SBAS*:L1 C/A
|
BDS:B1l、 B2l、B3l、B1C、B2a、B2b
GPS:L1 C/A、L1C、L2、L5
GLO:G1、G2
GAL:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS)
NavlC:L5
SBAS*:L1 C/A
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
NavIC L5
SBAS L1C/A
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
NavIC L5
SBAS L1C/A
|
|
Receiving channel
|
1507
|
1507
|
1408
|
1408
|
|
Cold start
|
≤30s
|
≤30s
|
26s
|
26s
|
|
Hot start
|
≤5s
|
≤5s
|
2s
|
2s
|
|
Re capture
|
≤1s
|
≤1s
|
2s
|
2s
|
|
Inertial navigation accuracy
|
/
|
/
|
<5% x driving distance (no GNSS signal)
|
<5% x driving distance (no GNSS signal)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5mCEP
|
Normal positioning: 1.5mCEP
|
Normal positioning::1.5m CEP
|
Normal positioning:1.5m CEP
|
|
RTK positioning: 0.01m+1ppmCEP
|
RTK positioning: 0.01m+1ppmCEP
|
RTK positioning::0.08m+ 1 ppm CEP
|
RTK positioning::0.08m+ 1 ppm CEP
|
|
Speed accuracy
|
0.03m/s
|
0.03m/s
|
0.05m/s
|
0.05m/s
|
|
Time accuracy
|
≤20ns
|
≤20ns
|
30ns
|
30ns
|
|
Baud rate
|
115200bps(Default)
|
115200bps(Default)
|
115200bps(Default)
|
115200bps(Default)
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA,RTCM3.3, UBX
|
NMEA,RTCM3.3, UBX
|
NMEA0183、Unicore
|
NMEA0183、Unicore
|
|
Update frequency
|
Default 1Hz(0.25Hz-10Hz)
|
Default 1Hz(0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-50Hz)
|
Default 1Hz ( 0.25Hz-50Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V~5.5V DC
|
3V~5.5V DC
|
3V-5.5V DC
|
3V-5.5V DC
|
|
Power consumption
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
|
Size
|
Φ42*31.2mm
|
Φ42*31.2mm
|
Φ42*31.2mm
|
Φ42*31.2mm
|
|
Weight
|
13.2g
|
13.2g
|
13.2g
|
13.2g
|
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
Storage temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-95℃
|
-40℃-95℃
|
|
Compass
|
/
|
Built in electronic compass IST8310
|
Built in electronic compass IST8310
|
Built in electronic compass RM3100
|
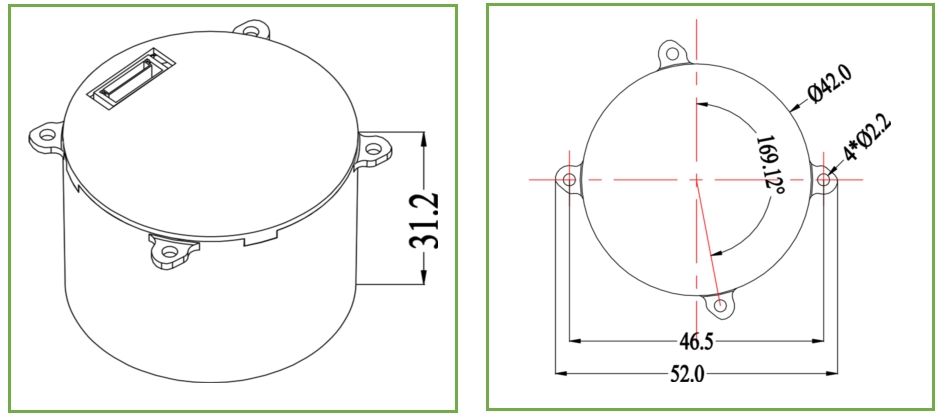
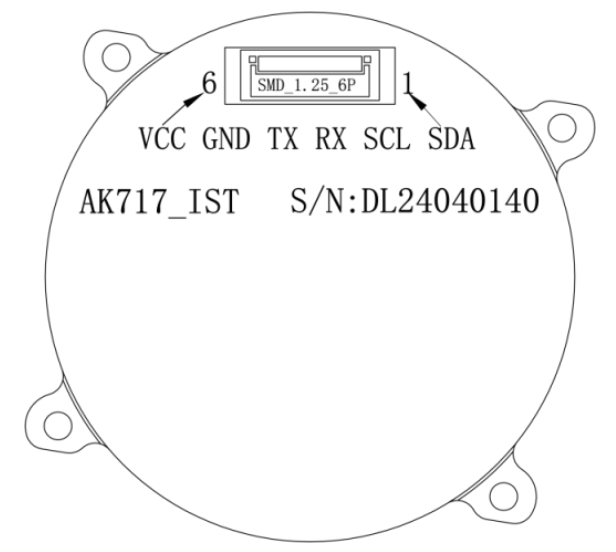
Table 1: Definition of 6PIN pins
|
NO.
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power supply input, +3.3V to +5V
|
|
2
|
GND
|
Module ground, this is the negative end of the power supply or the common ground point, used to complete the power circuit.
|
|
3
|
TX
|
Transmit - This pin is used in serial communication to send data to another device.
|
|
4
|
RX
|
Receive - This pin is used in serial communication to receive data from another device.
|
|
5
|
SCL
|
Serial Clock - In the I²C communication protocol, this is the clock signal line used to synchronize data transmission.
|
|
6
|
SDA
|
Serial Data - In the I²C communication protocol, this is the line used for data transmission.
|
|
Note: Typically, VCC and GND are used for power supply, TX and RX are used for serial communication, while SCL and SDA are used for I²C communication. These interfaces allow the receiver to exchange power supply and data with external devices.
|
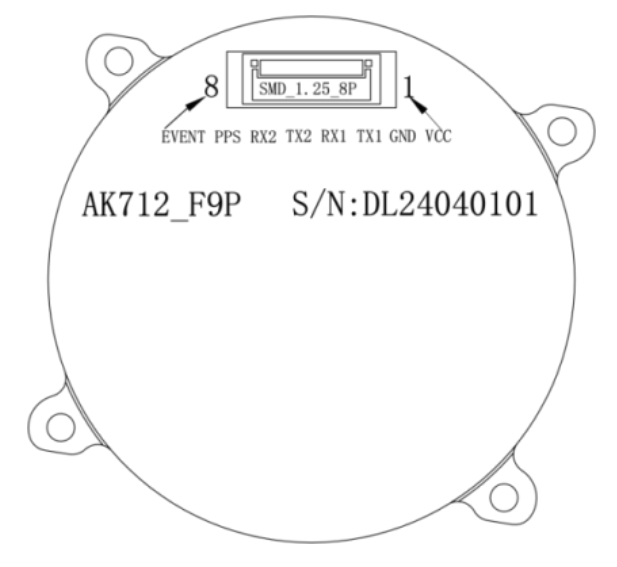
Table 2: Definition of 8PIN pins
|
No.
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power input, +3.3V to 5V
|
|
2
|
GND
|
Module ground
|
|
3
|
TX1
|
UART1 output, 3.3V TTL
|
|
4
|
RX1
|
UART1 input, 3.3V TTL
|
|
5
|
TX2
|
UART2 output, 3.3V TTL
|
|
6
|
RX2
|
UART2 input, 3.3V TTL
|
|
7
|
PPS
|
Pulse Per Second output for time synchronization
|
|
8
|
EVENT
|
Module external terminal output (default off)
|
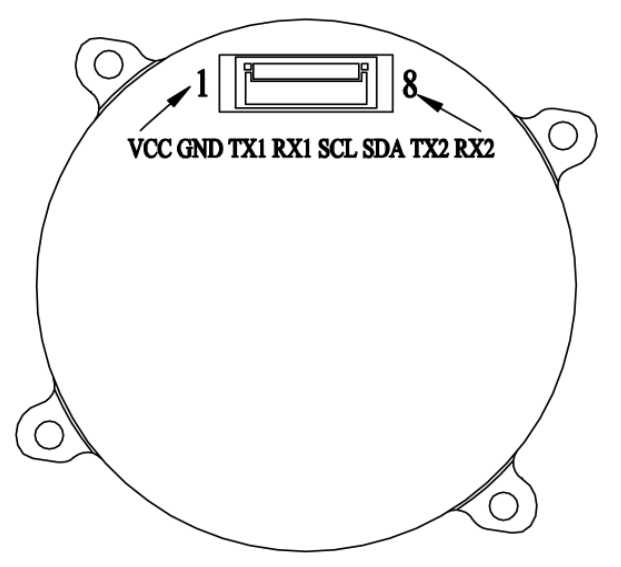
Table 3: Definition of 8PIN pins
|
Serial Number
|
Pin Definition
|
describe
|
|
1
|
VCC
|
Main power input+ 3.3V~5V
|
|
2
|
GND
|
Module grounding
|
|
3
|
TX1
|
Serial port 1 sends data, 3.3VTTL
|
|
4
|
RX1
|
Serial port 1 receives data, 3.3VTTL
|
|
5
|
SCL
|
I ² C serial clock(IST8310/RM3100)
|
|
6
|
SDA
|
I ² C serial data(IST8310/RM3100)
|
|
7
|
TX2
|
Serial port 2 sends data, 3.3VTTL
|
|
8
|
RX2
|
Serial port 2 receives data, 3.3VTTL
|
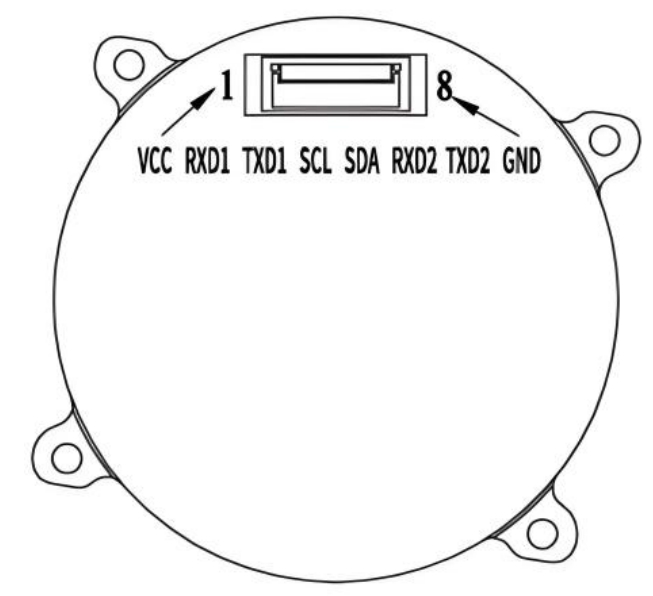
Table4: PIN Function
|
Pin Number
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power input,+ 5V
|
|
2
|
RXD1
|
Receive data port 1, 3.3VTTL
|
|
3
|
TXD1
|
Send data port 1, 3.3VTTL
|
|
4
|
SCL
|
I ² C Serial Clock (IST8310)
|
|
5
|
SDA
|
I ² C Serial Data (IST8310)
|
|
6
|
RXD2
|
Receive data port 2, 3.3VTTL
|
|
7
|
TXD2
|
Send data port 2, 3.3VTTL
|
|
8
|
GND
|
Grounding
|



























































