丨 Product IntroductionGNSS high-precision receiver:It can achieve centimeter level positioning and is suitable for unmanned aerial vehicles, automobiles, and measurement fields. Using carrier phase difference technology, supporting base station and mobile station modes as well as RTCM standards.
Performance: Static accuracy<1 centimeter, dynamic accuracy<2 centimeters, output rate 1-10/20Hz.
characteristic:Multi system support: Beidou, GPS, GALILEO, GLONASS joint computing.
Antenna advantage: Built in four arm spiral antenna ensures high precision.
Flexible configuration: can be used as a base station or mobile station.
Good compatibility: Compatible with flight systems such as Pixhawk and APM.
Low noise anti-interference: Industrial grade low-noise RF circuit with strong multipath resistance.
High precision mode: supports differential positioning and vector measurement.
丨 Specification parameters
|
Picture
Parameter
|

|
|
|
|
|
Product name
|
AK712
|
AK712RM
|
AK717
|
AK973T
|
|
Chip
|
UBX-F9P
|
UBX-F9P
|
UBX ZED-F9P
|
UM960
|
|
Operating Frequency
|
BDS: B1 B2
GPS: L1 L2
GLONASS: L1 L2
GALILEO:E1E2
QZSS: L1 L2
SBAS:
WASS,EGNOS,MSAS
|
BDS: B1 B2
GPS: L1 L2
GLONASS: L1 L2
GALILEO: E1 E2
QZSS: L1 L2
SBAS:
WASS,EGNOS,MSAS
|
GPS: L1, L2;
BDS: B1I, B2I;
GLONASS: L1, L2;
Galileo: E1, E5b;
QZSS :L1 L2
SBAS:
WASS, EGNOS, MSAS
|
BDS: B1I、B2I、B3I、B1C、B2a
GPS: L1C/A、L2P(W)、L2C、L5
GLONASS: L1C/A、L2C/A
Galileo: E1、E5b、E5a
QZSS: L1、L2、L5
|
|
Receiving channel
|
184
|
184
|
184
|
1408
|
|
Cold start
|
26s
|
26s
|
26s
|
< 30 s
|
|
Hot start
|
2s
|
2s
|
2s
|
/
|
|
Re capture
|
2s
|
2s
|
2s
|
/
|
|
Initialization Time
|
<5s (typical value)
|
<5s (typical value)
|
<5s (typical value)
|
<5s (typical value)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning:1.5m CEP
|
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.01cm+1 ppm CEP
|
RTK positioning: 0.8cm+ 1.5 ppm
|
|
Speed accuracy
|
<0.05m/s
|
<0.05m/s
|
<0.05m/s
|
0.0 3m/s
|
|
Time accuracy
|
30ns
|
30ns
|
30ns
|
20ns
|
|
Convergence time
|
≤10s
|
≤10s
|
≤10s
|
/
|
|
Baud rate
|
38400bps(Default)
|
38400bps(Default)
|
38400bps(Default)
|
115200bps(Default)
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183,RTCM 3.3,UBX
|
NMEA0183,RTCM 3.3,UBX
|
NMEA0183,RTCM 3.3,UBX
|
NMEA 0183, Unicore*
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.3/3.2/3.1/3.0
|
RTCM 3.x
|
RTCM 3.x
|
|
Update frequency
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-10Hz)
|
Default 1Hz ( 0.25Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3.3-5.5V DC
|
5V DC
|
|
Power consumption
|
<180mW @3.3V
|
<180mW @3.3V
|
<180mW @3.3V
|
800mW
|
|
Size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
Weight
|
13.2g
|
13.2g
|
13.2g
|
13.2g
|
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 6pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-35℃+80℃
|
-35℃+80℃
|
-35℃+80℃
|
-35℃+80℃
|
|
Storage temperature
|
-40℃-+85℃
|
-40℃-+85℃
|
-40℃-+85℃
|
-40℃-+85℃
|
|
Compass
|
|
Built in with electronic compass RM3100
|
Built in with electronic compass ist8310
|
Built in with electronic compass ist8310
|
|
Picture
Parameter
|

|
|
|
|
|
Product name
|
AK713
|
AK713T
|
AK713RM
|
AK713CAN
|
|
chip
|
UM980
|
UM980
|
UM980
|
UM980
|
|
Operating Frequency
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
|
|
Receiving channel
|
1408
|
1408
|
1408
|
1408
|
|
Cold start
|
<10s
|
<10s
|
<10s
|
<10s
|
|
Initialization time
|
<5s (Typical value)
|
<5s(Typical value)
|
<5s(Typical value)
|
<5s(Typical value)
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
RTK positioning: 0.8cm+1 ppm CEP
|
|
Speed accuracy
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
|
Time accuracy
|
10ns
|
10ns
|
10ns
|
10ns
|
|
Baud rate
|
115200bps(Default)
|
115200bps(Default)
|
115200bps(Default)
|
1Mbps
|
|
Output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
DroneCAN/UAVCAN
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.3 / 3.2 / 3.1 / 3.0 (RTCM data input only supported via UART2)
|
|
Update frequency
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
Default 1Hz(0.25Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
Working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3V-5.5V DC
|
5V DC
|
|
Power consumption
|
800mW
|
800mW
|
800mW
|
800mW
|
|
Size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
Weight
|
13.2g
|
13.2g
|
13.2g
|
13.2g
|
|
Joint
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
Operation temperature
|
-35℃-80℃
|
-35℃-80℃
|
-35℃-80℃
|
-35℃-80℃
|
|
Storage temperature
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
|
Compass
|
/
|
Built in electronic compass IST8310
|
Built in electronic compass RM3100
|
Built in electronic compass RM3100
|
|
Picture
Parameter
|
|
|
|
|
|
Product model
|
AK714
|
AK714T
|
AK724
|
AK734
|
|
chip
|
Beiyun M20
|
Beiyun M20
|
Beiyun M21
|
Beiyun M22
|
|
Operating Frequency
|
BDS:B1l、 B2l、B3l、B1C、B2a、B2b
GPS:L1 C/A、L1C、L2、L5
GLO:G1、G2
GAL:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS)
NavlC:L5
SBAS*:L1 C/A
|
BDS:B1l、 B2l、B3l、B1C、B2a、B2b
GPS:L1 C/A、L1C、L2、L5
GLO:G1、G2
GAL:E1、E5a、E5b、E6
QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS)
NavlC:L5
SBAS*:L1 C/A
|
BDS-2: B1I/B2I/B3I
BDS-3:B1C*/B2a/B2b(PPP)*/B3I
GPS: L1 C/A/L1C*/L2/L5
GLONASS: G1/G2
Galileo: E1/E5a/E5b/E6(HAS)*
QZSS: L1C/A/L1C/L2/L5、L6(CLAS)*
NavIC: L5
SBAS*:L1C/A
|
BDS-2: B1I/B2I/B3I
BDS-3:B1C*/B2a/B2b(PPP)*/B3I
GPS: L1 C/A/L1C*/L2/L5
GLONASS: G1/G2
Galileo: E1/E5a/E5b/E6(HAS)*
QZSS: L1C/A/L1C/L2/L5、L6(CLAS)*
NavIC: L5
SBAS*:L1C/A
|
|
Receiving channel
|
1507
|
1507
|
1507
|
1507
|
|
cold start
|
≤30s
|
≤30s
|
30s
|
30s
|
|
hot start
|
≤5s
|
≤5s
|
5s
|
5s
|
|
Re capture
|
≤1s
|
≤1s
|
≤1s
|
≤1s
|
|
Horizontal Accuracy
|
Normal positioning: 1.5mCEP
|
Normal positioning: 1.5mCEP
|
Single point: 1.5m
|
Single point: 1.5m
|
|
RTK positioning: 0.01m+1ppmCEP
|
RTK positioning: 0.01m+1ppmCEP
|
RTK:0.01m + 1ppm
|
RTK:0.01m + 1ppm
|
|
speed accuracy
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
0.03m/s
|
|
Second pulse accuracy
|
≤20ns
|
≤20ns
|
≤ 20 ns
|
≤ 20 ns
|
|
Inertial Navigation Type
|
/
|
/
|
Single inertial navigation system
|
Dual inertial navigation system
|
|
gyroscope
(Range)
|
/
|
/
|
±300°/s
|
±300°/s
|
|
gyroscope
(Zero bias instability)
|
/
|
/
|
5°/h
|
5°/h
|
|
gyroscope
(Scale error)
|
/
|
/
|
4‰
|
4‰
|
|
accelerometer
(Range)
|
/
|
/
|
± 16g
|
± 16g
|
|
accelerometer
(Zero bias instability)
|
/
|
/
|
50μg
|
50μg
|
|
accelerometer
(Scale error)
|
/
|
/
|
2‰
|
2‰
|
|
accelerometer
(System functional safety)
|
/
|
/
|
ASIL B
|
ASIL B
|
|
Baud rate
|
115200bps (default)
|
115200bps (default)
|
115200bps (default)
|
115200bps (default)
|
|
output interface
|
TTL
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA,RTCM3.3, BYNAV
|
NMEA,RTCM3.3, BYNAV
|
NMEA0183、RTCM 3.3
|
NMEA0183、RTCM 3.3
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
|
Data update frequency
|
Default 1Hz (0.25Hz-10Hz)
|
Default 1Hz (0.25Hz-10Hz)
|
Default 1Hz (0.25Hz-10Hz)
|
Default 1Hz (0.25Hz-10Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
built-in
|
|
working voltage
|
3V~5.5V DC
|
3V~5.5V DC
|
3V~5.5V DC
|
3V~5.5V DC
|
|
power consumption
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
|
size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
weight
|
14g
|
14g
|
14g
|
14g
|
|
interface
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
operation temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
storage temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
compass
|
/
|
Built in electronic compass IST8310
|
/
|
/
|
|
picture
parameter
|
|
|
|
|
model
|
AK723T
|
AK723RM
|
AK737
|
|
chip
|
UM981
|
UM981
|
Septentrio_mosaic-G5
|
|
Operating Frequency
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
NavIC L5
SBAS L1C/A
|
BDS: B1I B2I B3I B1C B2a B2b
GPS: L1 C/A L1C L2P (Y) L2C L5
GLONASS: L1 L2
Galileo: E1 E5a E5b E6
QZSS: L1 L2 L5 L6
NavIC L5
SBAS L1C/A
|
GPS: L1C/A, L1C, L2C,L2PY, L5
GLONASS: L1C/A, L2CA, L2P, L3 CDMA
BDS: B1I, B1C, B2a, B2I,B2b, B3I
Galileo: E1, E5a, E5b, E6
QZSS: L1C/A, L1C/B, L2C, L5,L6
|
|
working channel
|
1408
|
1408
|
789 channels (synchronized tracking across all constellations)
|
|
cold start
|
26s
|
26s
|
<35s
|
|
hot start
|
2s
|
2s
|
<10s
|
|
Re capture
|
2s
|
2s
|
<1s
|
|
Inertial navigation accuracy
|
<5% x driving distance (no GNSS signal)
|
<5% x driving distance (no GNSS signal)
|
/
|
|
Horizontal Accuracy
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.5m CEP
|
Normal positioning: 1.2m CEP
|
|
RTK positioning: 0.08m+1 ppm CEP
|
RTK positioning: 0.08m+1 ppm CEP
|
RTK positioning: 0.06m+0.5 ppm CEP
|
|
GNSS attitude accuracy
|
/
|
/
|
When the antenna spacing is 1 meter: heading accuracy is 0.15 °, roll/pitch accuracy is 0.25 °
When the antenna spacing is 5 meters: heading accuracy is 0.03 °, roll/pitch accuracy is 0.05 °
|
|
speed accuracy
|
0.05m/s
|
0.05m/s
|
0.03m/s
|
|
time accuracy
|
30ns
|
30ns
|
PPS resolution: 1.4ns
|
|
Baud rate
|
115200bps (default)
|
115200bps (default)
|
115200bps (default)
|
|
output interface
|
TTL
|
TTL
|
TTL
|
|
Output Protocol
|
NMEA0183、Unicore
|
NMEA0183、Unicore
|
NMEA 0183, v2.3, v3.03, V4.0
|
|
Differential Data
|
RTCM 3.x
|
RTCM 3.x
|
RTCM 3.x
|
|
Data update rate
|
Default 1Hz (0.25Hz-50Hz)
|
Default 1Hz (0.25Hz-50Hz)
|
Default 1Hz (1Hz-20Hz)
|
|
Carrier phase output
|
Support, output RAWX statement
|
Support, output RAWX statement
|
Support, output RAWX statement
|
|
FLASH
|
built-in
|
built-in
|
built-in
|
|
working voltage
|
3V-5.5V DC
|
3V-5.5V DC
|
3V-5.5V DC
|
|
power consumption
|
<800mW@3.3V
|
<800mW@3.3V
|
<800mW@3.3V
|
|
size
|
Φ44*40.6mm
|
Φ44*40.6mm
|
Φ44*40.6mm
|
|
weight
|
14g
|
14g
|
14g
|
|
interface
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
GH1.25mm 8pin
|
|
operation temperature
|
-40℃-85℃
|
-40℃-85℃
|
-40℃-85℃
|
|
storage temperature
|
-40℃-95℃
|
-40℃-95℃
|
-40℃-95℃
|
|
compass
|
Built in electronic compass IST8310
|
Built in electronic compass RM3100
|
Built in electronic compass IST8310
|
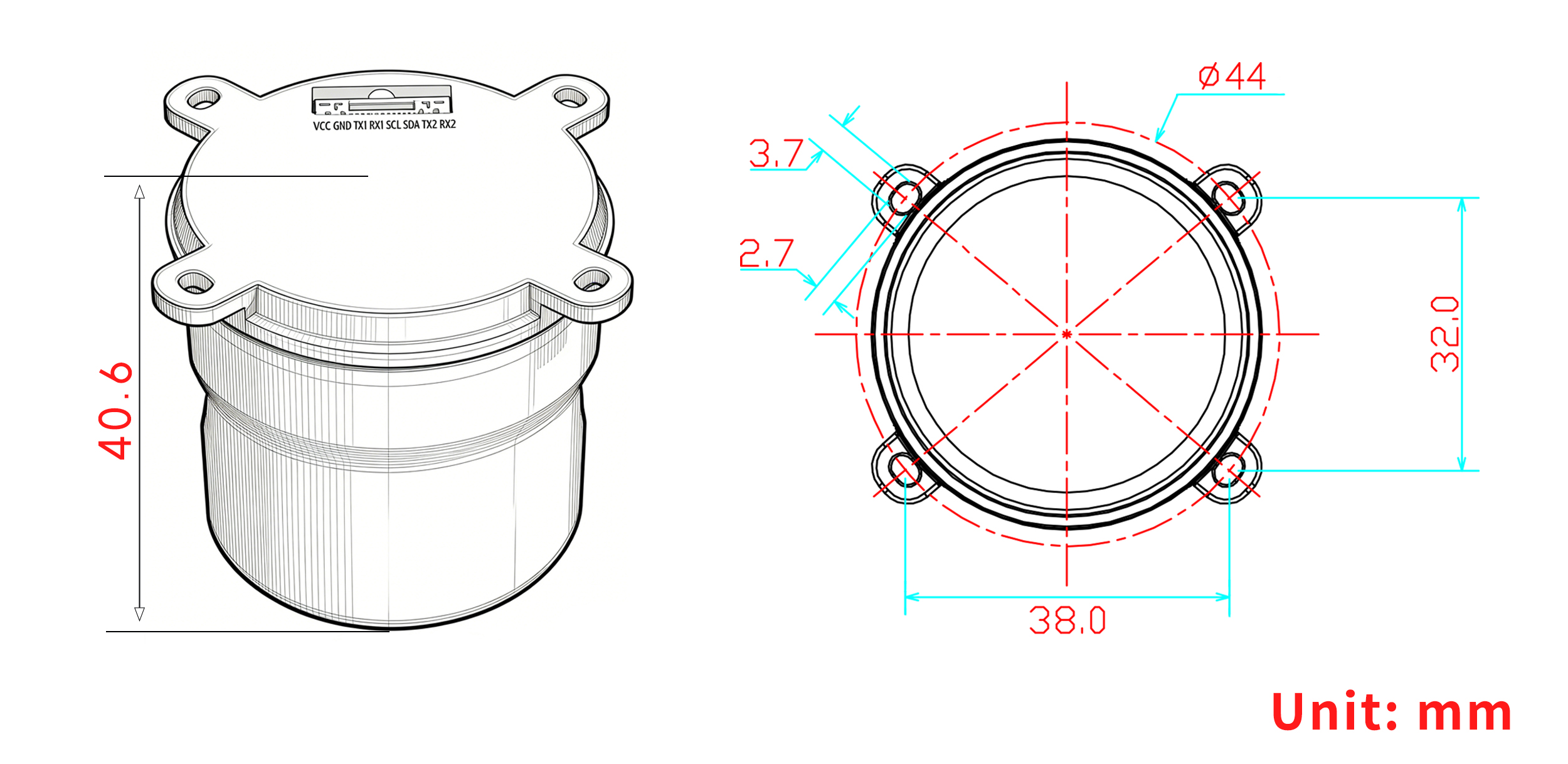
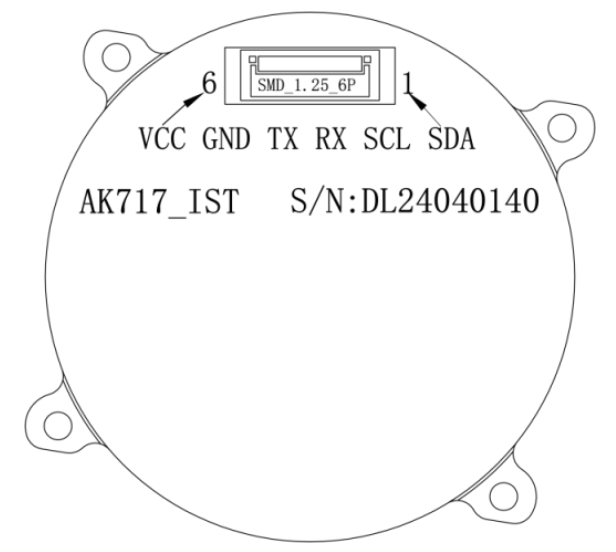
Table 1: Definition of 6PIN pins
|
NO.
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power supply input, +3.3V to +5V
|
|
2
|
GND
|
Module ground, this is the negative end of the power supply or the common ground point, used to complete the power circuit.
|
|
3
|
TX
|
Transmit - This pin is used in serial communication to send data to another device.
|
|
4
|
RX
|
Receive - This pin is used in serial communication to receive data from another device.
|
|
5
|
SCL
|
Serial Clock - In the I²C communication protocol, this is the clock signal line used to synchronize data transmission.
|
|
6
|
SDA
|
Serial Data - In the I²C communication protocol, this is the line used for data transmission.
|
|
Note: Typically, VCC and GND are used for power supply, TX and RX are used for serial communication, while SCL and SDA are used for I²C communication. These interfaces allow the receiver to exchange power supply and data with external devices.
|
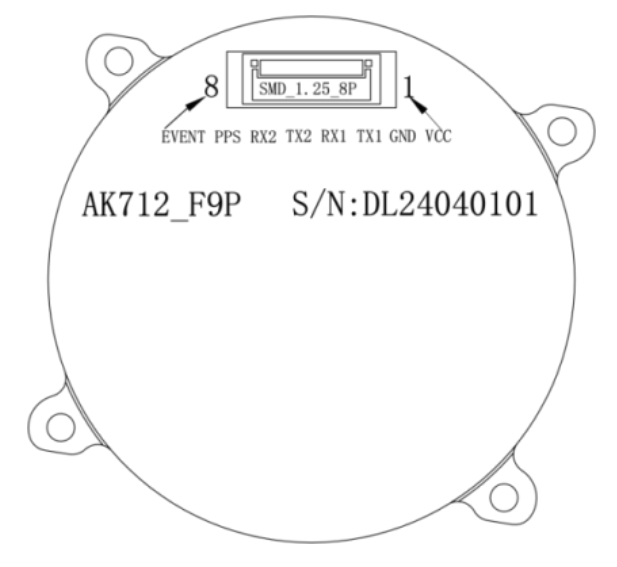
Table 2: Definition of 8PIN pins
|
No.
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power input, +3.3V to 5V
|
|
2
|
GND
|
Module ground
|
|
3
|
TX1
|
UART1 output, 3.3V TTL
|
|
4
|
RX1
|
UART1 input, 3.3V TTL
|
|
5
|
TX2
|
UART2 output, 3.3V TTL
|
|
6
|
RX2
|
UART2 input, 3.3V TTL
|
|
7
|
PPS
|
Pulse Per Second output for time synchronization
|
|
8
|
EVENT
|
Module external terminal output (default off)
|
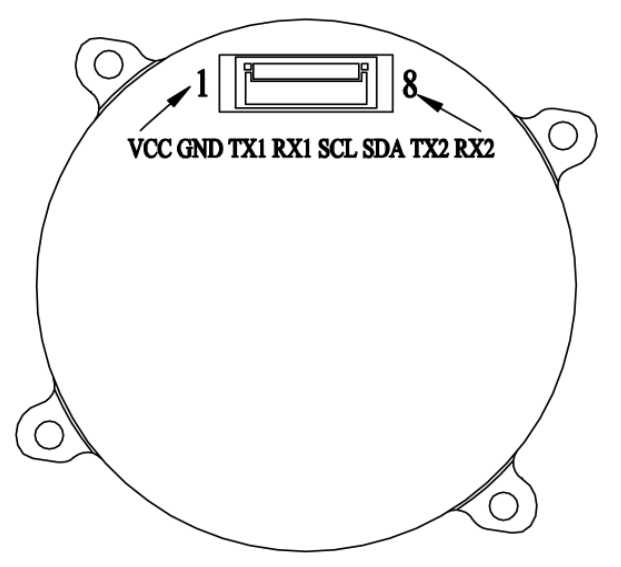
Table 3: Definition of 8PIN pins
|
Serial Number
|
Pin Definition
|
describe
|
|
1
|
VCC
|
Main power input+ 3.3V~5V
|
|
2
|
GND
|
Module grounding
|
|
3
|
TX1
|
Serial port 1 sends data, 3.3VTTL
|
|
4
|
RX1
|
Serial port 1 receives data, 3.3VTTL
|
|
5
|
SCL
|
I ² C serial clock(IST8310/RM3100)
|
|
6
|
SDA
|
I ² C serial data(IST8310/RM3100)
|
|
7
|
TX2
|
Serial port 2 sends data, 3.3VTTL
|
|
8
|
RX2
|
Serial port 2 receives data, 3.3VTTL
|
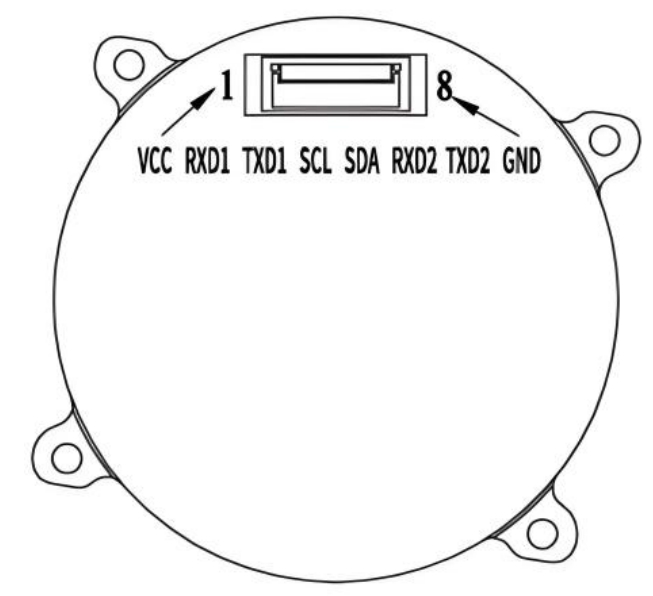
Table4: PIN Function
|
Pin Number
|
Signal Name
|
Signal Description
|
|
1
|
VCC
|
Main power input,+ 5V
|
|
2
|
RXD1
|
Receive data port 1, 3.3VTTL
|
|
3
|
TXD1
|
Send data port 1, 3.3VTTL
|
|
4
|
SCL
|
I ² C Serial Clock (IST8310)
|
|
5
|
SDA
|
I ² C Serial Data (IST8310)
|
|
6
|
RXD2
|
Receive data port 2, 3.3VTTL
|
|
7
|
TXD2
|
Send data port 2, 3.3VTTL
|
|
8
|
GND
|
Grounding
|
 Precision Navigation Solutions Tailored for UAV EnthusiastsThis GNSS receiver series is designed for users seeking highly accurate positioning with practical ease, especially in unmanned aerial vehicle applications. Whether you are deploying lightweight drones or advanced UAVs, these devices provide centimeter-level accuracy through integrated gnss rtk module technology. The built-in compass system ensures precise directional data, which enhances flight stability and navigation control. With support for multiple constellations including Beidou, GPS, and Galileo, these receivers accommodate a global user base requiring reliable and robust rtk base station or mobile positioning capabilities suitable for various aerial missions.Advanced Technical Architecture for Reliable PositioningAt the core of this product range is cutting-edge carrier phase difference technology compliant with RTCM protocols, enabling precise and stable RTK positioning. Featuring multi-frequency and multi-constellation reception, the modules support up to 1507 channels with accuracy down to 0.01 cm plus 1 ppm CEP under RTK mode. Industrial-grade low-noise RF circuits mitigate interference and enhance signal quality, critical for maintaining uninterrupted rtk gnss performance during dynamic UAV operations. Compact form factors with integrated antennas and onboard flash storage facilitate easy embedding into popular flight control systems such as Pixhawk, optimizing workflow efficiency for developers and operators alike.Expanding Real-World Value Across Drone and Surveying IndustriesThese advanced GNSS receivers elevate unmanned aerial vehicle reliability in complex environments, ensuring centimeter-accurate navigation critical for mapping, surveying, and aerial data acquisition. Whether configured as a mobile receiver or rtk base station, the modules adapt to diverse industrial needs while supporting real-time kinematic positioning essential for precision agriculture, construction, and infrastructure monitoring. Their compatibility with flight controllers combined with robust anti-jamming capabilities addresses challenges presented by GPS-denied zones or multipath interference, reinforcing operational confidence across all UAV-based applications.Use ScenariosPrecision Navigation in Aerial Surveying and MappingIn the surveying industry, the demand for centimeter-level location accuracy is critical for collecting reliable geographic data through drones. These GNSS receivers act as integral components within UAV systems to deliver real-time positioning and orientation with exceptional precision, leveraging rtk gnss technology to enhance mapping quality. Their ability to support both base station and mobile station operations allows surveyors to configure networks dynamically based on operational needs. The robust anti-interference features ensure consistent data capture even in challenging signal environments, while built-in compasses aid in maintaining correct drone directional alignment during complex flight paths.Enhancing UAV Flight Control in Precision AgricultureIn precision agriculture, reliable positioning directly impacts planting, monitoring, and harvesting efficiency. These receivers facilitate exact UAV positioning with gnss rtk module support, ensuring field operations are executed with centimeter-level accuracy. The devices integrate smoothly into drone flight control systems, improving navigational precision for crop health assessments and resource management. Featuring multi-constellation access including GPS and Beidou, these modules provide consistent positioning even in remote or obstructed agricultural landscapes. Their real-time data output supports adaptive flight path adjustments, optimizing workflow integration within agricultural management platforms and enhancing overall crop monitoring performance.FAQWhat is the positioning accuracy of the F9P/UM980 series GNSS RTK receivers?These GNSS RTK receivers deliver centimeter-level positioning accuracy, with standard positioning around 1.5 meters CEP and RTK positioning precision up to 0.01 cm plus 1 ppm CEP, ensuring reliable rtk gps performance for unmanned aerial applications.Are the GNSS RTK modules compatible with common flight controllers?Yes. The series supports integrated use with well-known flight control systems like Pixhawk and APM, allowing seamless connection and reliable data for UAV navigation using the rtk gnss modules.Can these GNSS receivers be configured as both base stations and mobile stations?Absolutely. These devices support dual operation modes, enabling users to configure them flexibly as either a base station or a mobile station, enhancing their application scope in precision navigation and mapping.What should be considered when installing the GNSS RTK receivers on UAVs?Installation requires careful placement of the compact receiver with built-in antennas to minimize interference. Connectors support TTL UART, and power supply ranges from 3V to 5.5V DC. Proper integration ensures consistent high-precision rtk gps data for flight controllers.
Precision Navigation Solutions Tailored for UAV EnthusiastsThis GNSS receiver series is designed for users seeking highly accurate positioning with practical ease, especially in unmanned aerial vehicle applications. Whether you are deploying lightweight drones or advanced UAVs, these devices provide centimeter-level accuracy through integrated gnss rtk module technology. The built-in compass system ensures precise directional data, which enhances flight stability and navigation control. With support for multiple constellations including Beidou, GPS, and Galileo, these receivers accommodate a global user base requiring reliable and robust rtk base station or mobile positioning capabilities suitable for various aerial missions.Advanced Technical Architecture for Reliable PositioningAt the core of this product range is cutting-edge carrier phase difference technology compliant with RTCM protocols, enabling precise and stable RTK positioning. Featuring multi-frequency and multi-constellation reception, the modules support up to 1507 channels with accuracy down to 0.01 cm plus 1 ppm CEP under RTK mode. Industrial-grade low-noise RF circuits mitigate interference and enhance signal quality, critical for maintaining uninterrupted rtk gnss performance during dynamic UAV operations. Compact form factors with integrated antennas and onboard flash storage facilitate easy embedding into popular flight control systems such as Pixhawk, optimizing workflow efficiency for developers and operators alike.Expanding Real-World Value Across Drone and Surveying IndustriesThese advanced GNSS receivers elevate unmanned aerial vehicle reliability in complex environments, ensuring centimeter-accurate navigation critical for mapping, surveying, and aerial data acquisition. Whether configured as a mobile receiver or rtk base station, the modules adapt to diverse industrial needs while supporting real-time kinematic positioning essential for precision agriculture, construction, and infrastructure monitoring. Their compatibility with flight controllers combined with robust anti-jamming capabilities addresses challenges presented by GPS-denied zones or multipath interference, reinforcing operational confidence across all UAV-based applications.Use ScenariosPrecision Navigation in Aerial Surveying and MappingIn the surveying industry, the demand for centimeter-level location accuracy is critical for collecting reliable geographic data through drones. These GNSS receivers act as integral components within UAV systems to deliver real-time positioning and orientation with exceptional precision, leveraging rtk gnss technology to enhance mapping quality. Their ability to support both base station and mobile station operations allows surveyors to configure networks dynamically based on operational needs. The robust anti-interference features ensure consistent data capture even in challenging signal environments, while built-in compasses aid in maintaining correct drone directional alignment during complex flight paths.Enhancing UAV Flight Control in Precision AgricultureIn precision agriculture, reliable positioning directly impacts planting, monitoring, and harvesting efficiency. These receivers facilitate exact UAV positioning with gnss rtk module support, ensuring field operations are executed with centimeter-level accuracy. The devices integrate smoothly into drone flight control systems, improving navigational precision for crop health assessments and resource management. Featuring multi-constellation access including GPS and Beidou, these modules provide consistent positioning even in remote or obstructed agricultural landscapes. Their real-time data output supports adaptive flight path adjustments, optimizing workflow integration within agricultural management platforms and enhancing overall crop monitoring performance.FAQWhat is the positioning accuracy of the F9P/UM980 series GNSS RTK receivers?These GNSS RTK receivers deliver centimeter-level positioning accuracy, with standard positioning around 1.5 meters CEP and RTK positioning precision up to 0.01 cm plus 1 ppm CEP, ensuring reliable rtk gps performance for unmanned aerial applications.Are the GNSS RTK modules compatible with common flight controllers?Yes. The series supports integrated use with well-known flight control systems like Pixhawk and APM, allowing seamless connection and reliable data for UAV navigation using the rtk gnss modules.Can these GNSS receivers be configured as both base stations and mobile stations?Absolutely. These devices support dual operation modes, enabling users to configure them flexibly as either a base station or a mobile station, enhancing their application scope in precision navigation and mapping.What should be considered when installing the GNSS RTK receivers on UAVs?Installation requires careful placement of the compact receiver with built-in antennas to minimize interference. Connectors support TTL UART, and power supply ranges from 3V to 5.5V DC. Proper integration ensures consistent high-precision rtk gps data for flight controllers.









































